my_bot
Link for posting questions
https://github.com/SunzidHassan/my_bot/issues
Robot Navigation
We want to develop a robot navigation algorithm that can process robot’s sensor data to generate robot navigation commands to fulfill the given objective.
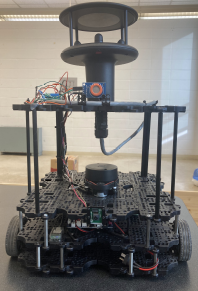
For this toy problem, we have a differential driver robot with the following sensors:
- Camera (with depth sensing)
- Laser distance sensing
Objective: we want to write a program that can guide the robot to score goals!
Environments:
We can first develop our algorithm in a simulation environment:

And then test the algorithm in real world.
For simulation, we need:
- Robot operaing system environment
- Gazebo simulation environment
Setting up Robot Operating System Envrionment
Robot Operating System (ROS) requires specific versions of Ubuntu. For example, ROS 2 Humble require Ubuntu 22.04. We can use Visual Studio Code dev container to setup ROS environment in a wide variety of operating systems. For this we need:
- Visual Studio Code
- Docker engine
Install Visual Studio Code
Use app store, or visit Download Visual Studio Code.
Install docker engine
Ubuntu
Find Install using the convenience script from Install Docker Engine on Ubuntu. In your terminal, execute
curl -fsSL https://get.docker.com -o get-docker.sh
sudo sh ./get-docker.sh
sudo groupadd docker
sudo usermod -aG docker $USER
Then reboot your pc.
Setup ROS Container
- You need to install Visual Studio Code’s Remote Development extension. Click on the Extension tab, search for Remote Development, install.
- Create a new directory (folder) called
my_botin a suitable place. - Open the folder in Visual Studio Code.
- At the bottom-left corner you will find a blue button, click it > Select Reopen in container > Add configuration to workspace > Show All Templates … > Type ROS > Select ROS (ijnek) > Select humble > desktop-full > Search for and select extensions: ‘Lightweight Desktop’ > keep defaults and wait for the setup to finish.
Please don’t add PyThon or Anaconda extensions.
Clone the robot code
Go to https://github.com/SunzidHassan/src.git, click Use this template > Create a new repository. Give it a suitable name, and copy the url of your repository.
Setting up the simulation environment
Open a terminal and execute the following commands:
cd my_bot && mkdir src
git clone <URL OF YOUR REPOSITORY>
cd my_bot
colcon build --symlink-install
source install/setup.bash
ros2 launch my_bot launch_sim.launch.py world:=./src/my_bot/worlds/football.world
Wait for the simulation to start. Then open a new terminal and execute the following commands:
cd my_bot
source install/setup.bash
ros2 run teleop_twist_keyboard teleop_twist_keyboard
You can now drive the robot in the simulated environment.
To observe the sensor readings, open a new terminal and execute:
rviz2 -d src/my_bot/config/view_bot.rviz
Controlling the robot
Open a new terminal and execute:
ros2 run my_bot_controller my_bot_subpub
You’ll find the robot has started to move automatically. You can also find some informative output in the terminal.
In your vscode editor, open the file: my_bot>src>my_bot_controller>my_bot_controller>my_bot_subpub.py
In lines 84, 85, you’ll file the lines:
msg.linear.x = 0.01
msg.angular.z = 0.05
Change the values (stay within 0-1). Stop the program my_bot_subpub by pressing ctrl+c and run it again. Notice any changes in robot’s movement?